Pixel-Accurate Epipolar Guided Matching
News
- [March 2026] Code released on GitHub.
- [January 2026] Paper accepted to 3DV 2026!
- [Coming Soon] Paper will be available on arXiv.
Abstract
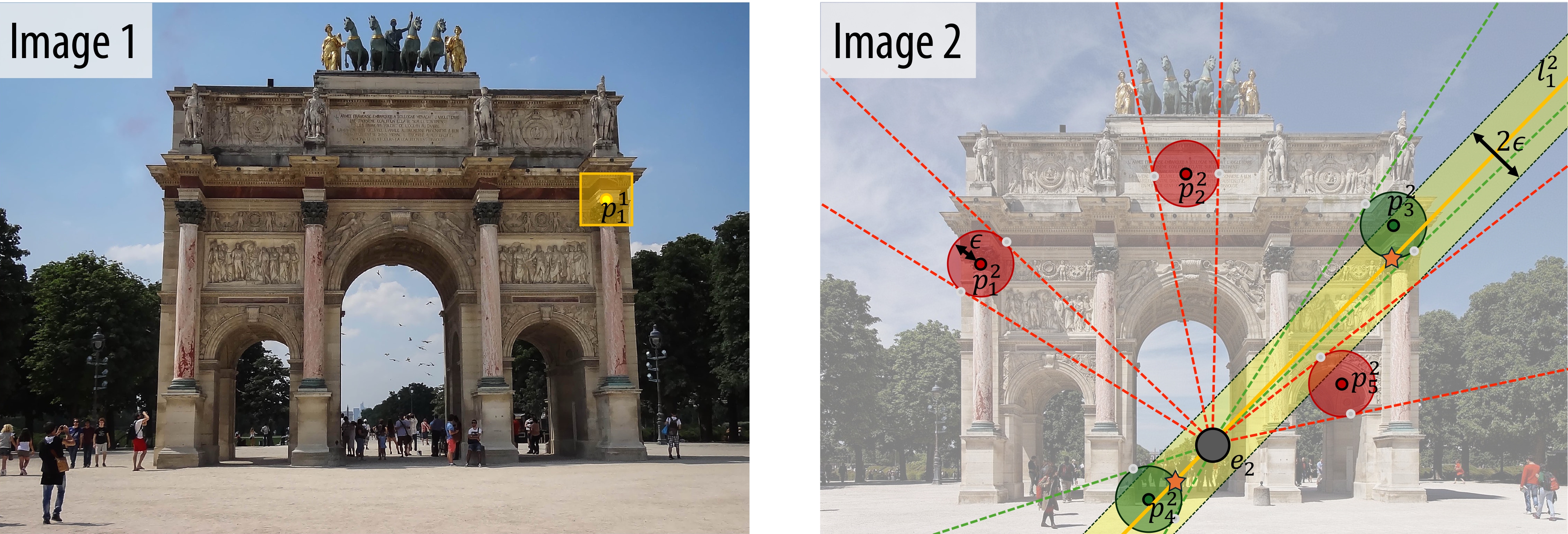
Keypoint matching can be slow and unreliable in challenging conditions such as repetitive textures or wide-baseline views. In such cases, known geometric relations (e.g., the fundamental matrix) can be used to restrict potential correspondences to a narrow epipolar envelope, thereby reducing the search space and improving robustness. These epipolar-guided matching approaches have proved effective in tasks such as SfM; however, most rely on coarse spatial binning, which introduces approximation errors, requires costly post-processing, and may miss valid correspondences. We address these limitations with an exact formulation that performs candidate selection directly in angular space. In our approach, each keypoint is assigned a tolerance circle which, when viewed from the epipole, defines an angular interval. Matching then becomes a 1D angular interval query, solved efficiently in logarithmic time with a segment tree. This guarantees pixel-level tolerance, supports per-keypoint control, and removes unnecessary descriptor comparisons. Extensive evaluation on ETH3D demonstrates noticeable speedups over existing approaches while recovering exact correspondence sets.
Key Features
Exact Formulation
Pixel-level tolerance without approximation errors or spatial discretization.
Fast Queries
O(log N + K) candidate retrieval per query using a segment tree.
Perfect Recall
Recovers all valid correspondences within the epipolar envelope.
Per-Keypoint Control
Supports individual tolerance settings and handles all epipole configurations.
Method Overview
Our approach introduces several key innovations:
- Angular Interval Formulation: Reformulates epipolar envelope constraints as 1D angular intervals viewed from the epipole.
- Tolerance Circle Method: Associates each keypoint with a tolerance disk that defines an angular visibility region.
- Segment Tree Data Structure: Enables O(log N + K) candidate queries using a balanced segment tree over angular intervals.
- Exact Geometric Filtering: Guarantees pixel-level precision with no approximation errors or post-processing heuristics.
Results
_page-0001.jpg)
Key Findings:
- Consistent speedups over existing epipolar-guided matching approaches (grid-based and Epipolar Hashing).
- Perfect candidate recall (1.00) — recovers all valid correspondences within the epipolar envelope.
- O(log N + K) query complexity vs. O(N) for brute-force methods.
- Robust performance across all 13 ETH3D sequences with varying scene complexity.
- Scalable to 50k+ keypoints per image.
Citation
If you find this work useful for your research, please consider citing:
@inproceedings{nasypanyi2026pixelaccurate,
title = {Pixel-Accurate Epipolar Guided Matching},
author = {Oleksii Nasypanyi and Francois Rameau},
booktitle = {Thirteenth International Conference on 3D Vision},
year = {2026},
url = {https://openreview.net/forum?id=9zRX5HrpnA}
}
Contact
For questions, please contact oleksii.nasypanyi@stonybrook.edu (Stony Brook University).